
Le mani sono organi prensili: la loro funzione è di prendere le cose. Per svolgere questo compito, la mano umana è dotata di ventisette ossa, diciannove muscoli e centinaia di tendini. Ma soprattutto sfrutta il senso del tatto. La mano dei robot, invece, non riesce ancora a svolgere correttamente la sua funzione prensile… non sa ruotare completamente gli oggetti che impugna e non sa dosare la forza delle dite per adattarsi al materiale. Ecco perché all’Università di Yale si sono impegnati per sviluppare una mano robotica con presa adattiva.

La mano del robot del futuro
I robot hanno bisogno di mani adattive, cioè in grado di adeguarsi a diversi oggetti e materiali. Ma fino a un certo punto. In industria, per esempio, le componenti robotiche hanno appendici (pinze o tenaglie) che svolgono pochi compiti e, dunque, non hanno bisogno di adattarsi a diversi oggetti e consistenze. Tutto cambia però con i robot “infermieri” o “assistenti”, che dovranno invece imparare a usare le mani come facciamo noi umani: dosando la forza e imparando a ruotare e manipolare correttamente ogni oggetto. Noi uomini, lo diamo per scontato, ma quando raccogliamo qualcosa, siamo soliti muovere tante volte l’oggetto nel palmo e fra le dita. Lo facciamo per ottenere una presa migliore. E questo deve fare anche la mano del robot del futuro…
Ecco perché all’Università di Yale hanno sviluppato una mano robotica che sa ruotare gli oggetti che raccoglie per trovare una presa ottimale. Questa tecnologia, apparentemente marginale, potrebbe fornire una svolta per l’avanzamento dei robot assistenti e medici. Ma non solo. Potrebbe anche essere utile a scopi di assemblaggio. Per esempio, il dispositivo potrebbe raccogliere un oggetto e orientarlo per inserirlo in uno slot o posizionarlo in un determinato modo.
Come far ruotare i palmi di un robot?
Aaron Dollar, professore di ingegneria meccanica, scienza dei materiali e informatica, ha raccolto attorno a sé un team di ricercatori specializzati in robotica per creare una mano robot in grado di ruotare completamente vari oggetti, anche se le sue pinze interrompono occasionalmente il contatto con l’oggetto. I risultati di questa ricerca di sviluppo sono stati pubblicati su IEEE Robotics and Automation Letters.
POTREBBE ANCHE INTERESSARTI >>> Gli Stati Uniti piazzano un cane-robot a guardia del confine con il Messico
L’idea era quella di creare un dispositivo robotico in cui le dita si aprono e si chiudono con più fluidità, anche dopo la presa, per spostarsi sull’oggetto afferrato e migliorare il “tocco”. La mano robotica dispone infatti di punta delle dita (che di solito i robot non hanno) e di un adattamento della rotazione interna del polso. Oltre a ciò, il dispositivo presenta pochi sensori. Questo perché i ricercatori volevano dar vita a una componente pratica, non troppo costosa o che non richiedesse troppa manutenzione.
Come si muove la mano robotica?
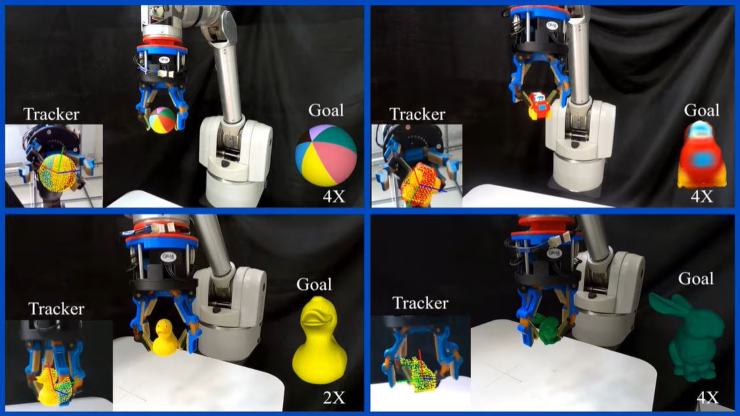
Per far muovere la pinza, i ricercatori hanno utilizzato una trasmissione sottoattivata azionata da un sistema a tendine. Nella mano, ci sono meno motori di quante siano le articolazioni. E proprio questa “semplicità” fa muovere la mano con più naturalezza, cioè in modo più “avvolgente”. Ovviamente c’è anche una fotocamera che tiene traccia in tempo reale della posizione dell’oggetto che la mano sta manipolando.
POTREBBE ANCHE INTERESSARTI >>> Swifty, il robot di perforazione termica che scava tunnel in ogni tipo di roccia
Abbinando la natura adattiva della mano ai dati raccolti dalla telecamere, il team è riuscito a controllare la mano solo grazie alla vista. Cioè senza sensori tattili. Durante i test, il dispositivo ha manipolato con successo oggetti di varie forme, tra cui una palla, una macchinina, un coniglietto e un’anatroccolo di plastica.





